Ever evolving logistical demands, coupled with resource constraints increased the demand for Autonomous Platforms – as they play an increasing role in achieving efficiency and flexibility.
For a Platform to navigate autonomously i.e. without intervention from a human operator, technology in the area of guidance and localization is needed.
Every technology used for guidance and localization has their benefits, and should be selected based on the application. Questions should be asked to oneself on the criteria needed prior to decision-making. For instance is accuracy is needed? Is the environment dynamically changing? Is there close contact to humans and other machines? How much speed is needed?
Where position accuracy is needed or dynamic environmental conditions are prevalent, e.g. narrow hallways alongside humans, docking stations for charging, SICK Optical Line Guidance (OLS) would be the perfect choice.
Rugged and Reliable
Compensation for contamination or surface defects of tape
Small curve radii of up to 0.5 m possible
High position accuracy (±1mm)
Flexible deployment with low infrastructure installation costs
Guide with conventional adhesive tape
Simple line shifts and route changes
Independent of ground material or color
Ease of Navigation & Assets Management
Ability to read barcodes makes it possible to determine its location
Ability to provide direction of move
Introducing SICK OLS - The Optical Line Guidance sensor detecting conventional luminescent adhesive tape regardless of the background, contamination or surface defects with an accuracy of ±1mm.
In the area of position, the OLS is able to read 1D codes along the path.
The OLS is therefore the most cost-effective solution for line guidance and localization with a focus on ruggedness and low infrastruction setup cost.

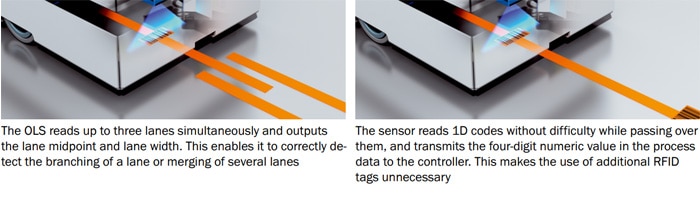
Flexible line guidance through large reading field and 1D code reading function
Thanks to its large reading field of 180 mm, the OLS is able to stably master curved trajectories even at high speeds and small radii. Even for lane branches or merges it can read up to three lanes. The 1D code reading function allows positioning based on landmarks or the transmission of route commands.